Self-driving car
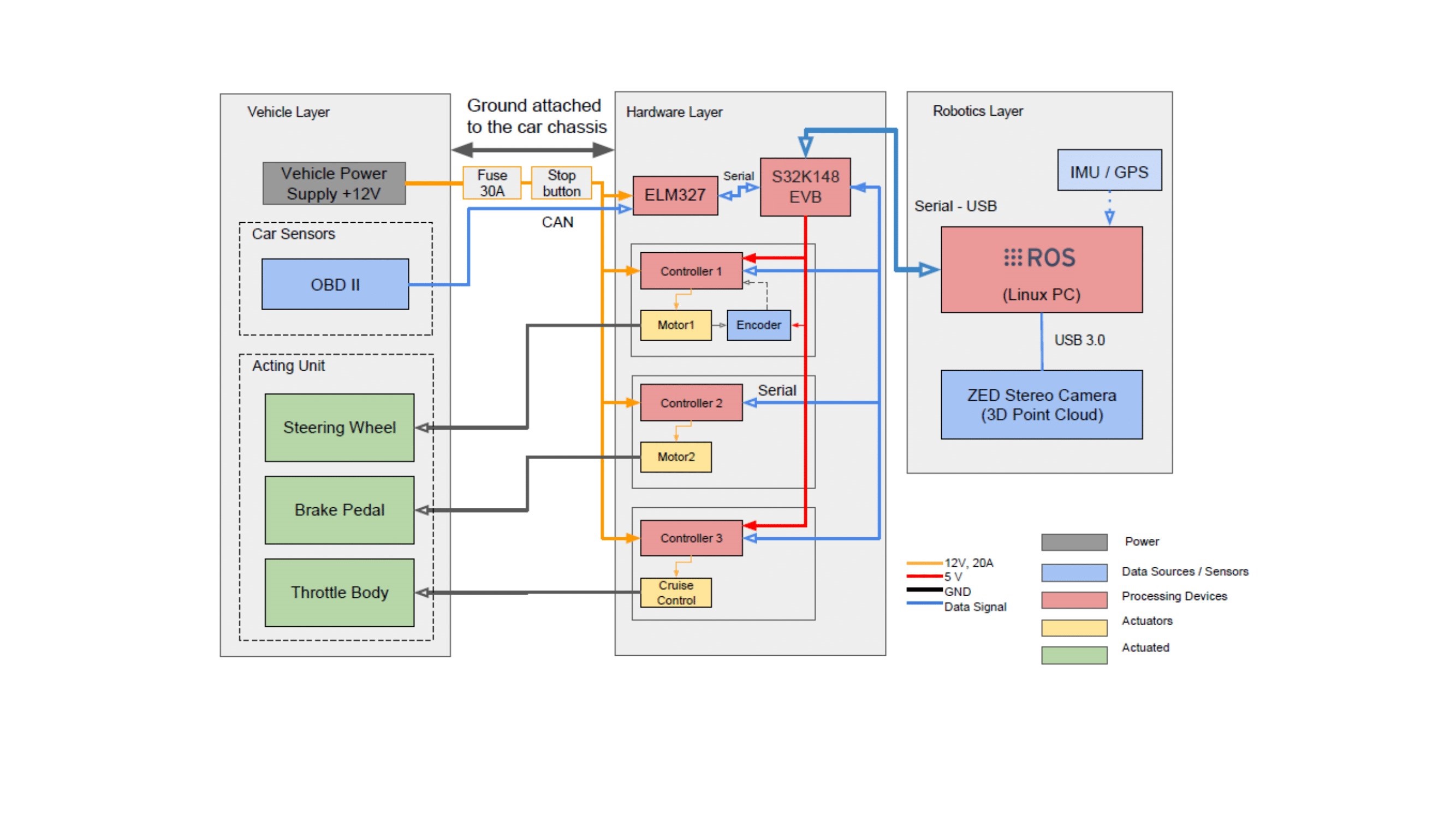
Developed software architecture and instrumentation of a Jeep Cherokee for use as an autonomous driving research platform ROS framework architecture and embedded SW ussing Nvidia Tx2, NXP S32K148, Zed Camera (Supervised by PhD. Oscar Carbajal). Implementing Sliding mode controller for Steering wheel and a convolutional neural network (CNN) YOLO3, for people detection.